
Hi there  Welcome to my Homepage!
Welcome to my Homepage!
I am an undergraduate (2022-2026) at Huazhong University of Science and Technology and an incoming PhD at AutoMan@NTU with Prof. Chen Lyu, passionate about Autonomous Driving and Computer Vision.
Previously I worked at AIR@THU with Prof. Hao Zhao and Autolab@WLU with Prof. Kaicheng Yu.
Currently I conduct the WM and E2E research at Neolix.
News
- DriveCombo is accepted in CVPR 2026🔥
- UMPE is accepted in ICRA 2026 (Oral Presentation)🔥
- Delving into Uncertainty is accepted in IROS 2025 (Oral Presentation)🔥
- Chameleon is accepted in ICRA 2025 (Oral Presentation)🔥
- Brain-Controlled Robotic Arm was selected as National Innovation Program (National-level)🏆
Experience
Nanyang Technological University
Aug 2026 –
Ph.D at AutoMan@NTU
Neolix
Feb 2026 – Present
Research Intern at Neolix-AD
Westlake University
Jun 2025 – Jan 2026
Research Assistant at AutoLab
Tsinghua University
Jun 2024 – Nov 2025
Research Assistant at AIR
Huazhong Univ of Sci and Tech
Sep 2022 – Jul 2026
Research Assistant at XWCV
Projects
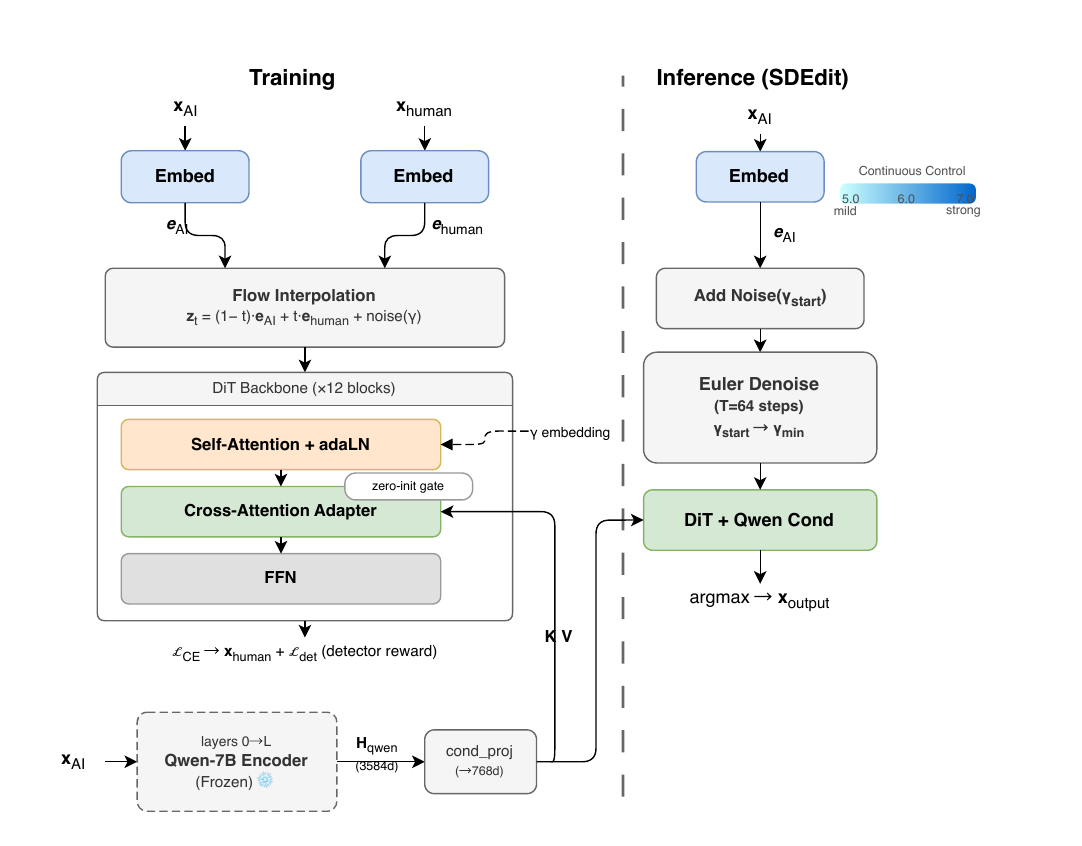
StyleShield: Exposing the Fragility of AIGC Detectors through Continuous Controllable Style Transfer
Guantian Zheng*
StyleShield, the first flow matching framework for conditional text style transfer in continuous token embedding space. A single parameter γ provides smooth, continuous control over the evasion--preservation trade-off, fundamentally inaccessible to discrete-token methods.
EMNLP 2026 submitted [arxiv] [code] [dataset]
Guantian Zheng*
StyleShield, the first flow matching framework for conditional text style transfer in continuous token embedding space. A single parameter γ provides smooth, continuous control over the evasion--preservation trade-off, fundamentally inaccessible to discrete-token methods.
EMNLP 2026 submitted [arxiv] [code] [dataset]
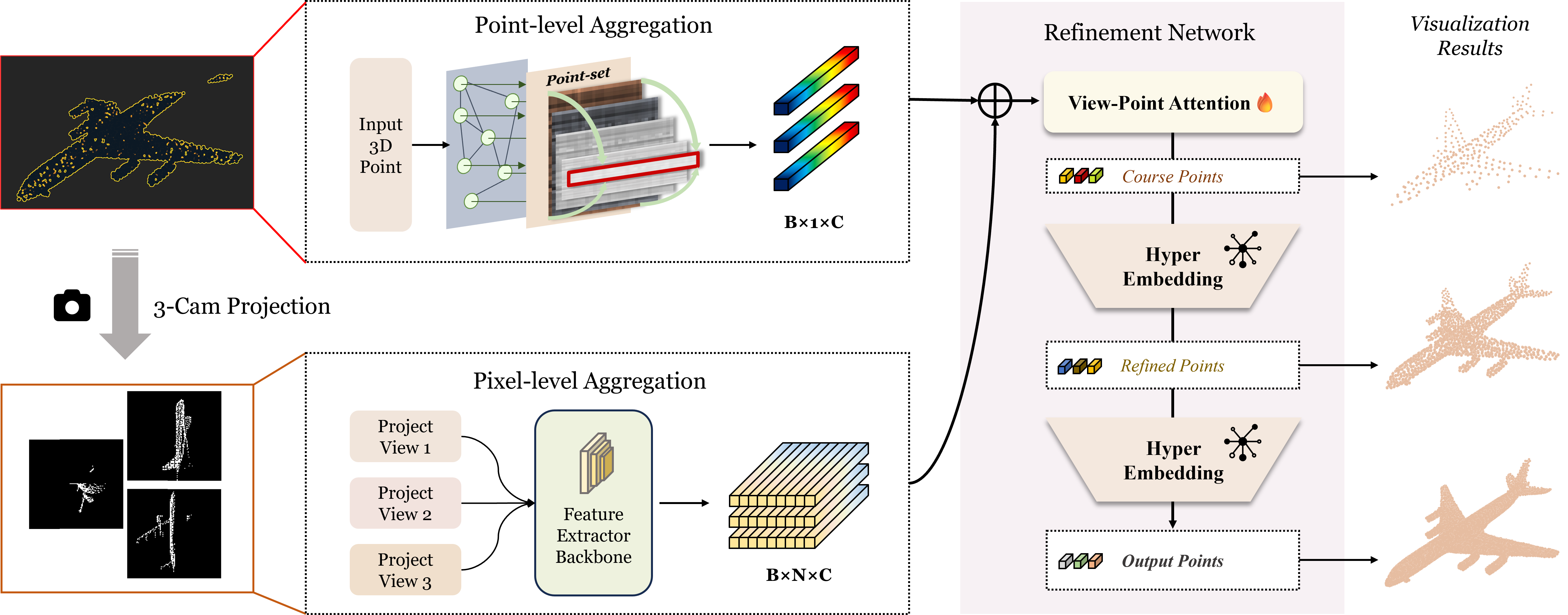
Hyper2: Unleashing Hyperbolic Geometry's Full Potential through Dual-Space Consistency
Guantian Zheng* Haiyang Xu
Hyper2 identifies cross-geometry mismatch as the bottleneck of hyperbolic point cloud completion and resolves it via dual-space consistency, achieving 22.9% CD reduction with only 1.6% FLOPs overhead.
BMVC 2026 submitted [arxiv] [code] [dataset]
Guantian Zheng* Haiyang Xu
Hyper2 identifies cross-geometry mismatch as the bottleneck of hyperbolic point cloud completion and resolves it via dual-space consistency, achieving 22.9% CD reduction with only 1.6% FLOPs overhead.
BMVC 2026 submitted [arxiv] [code] [dataset]
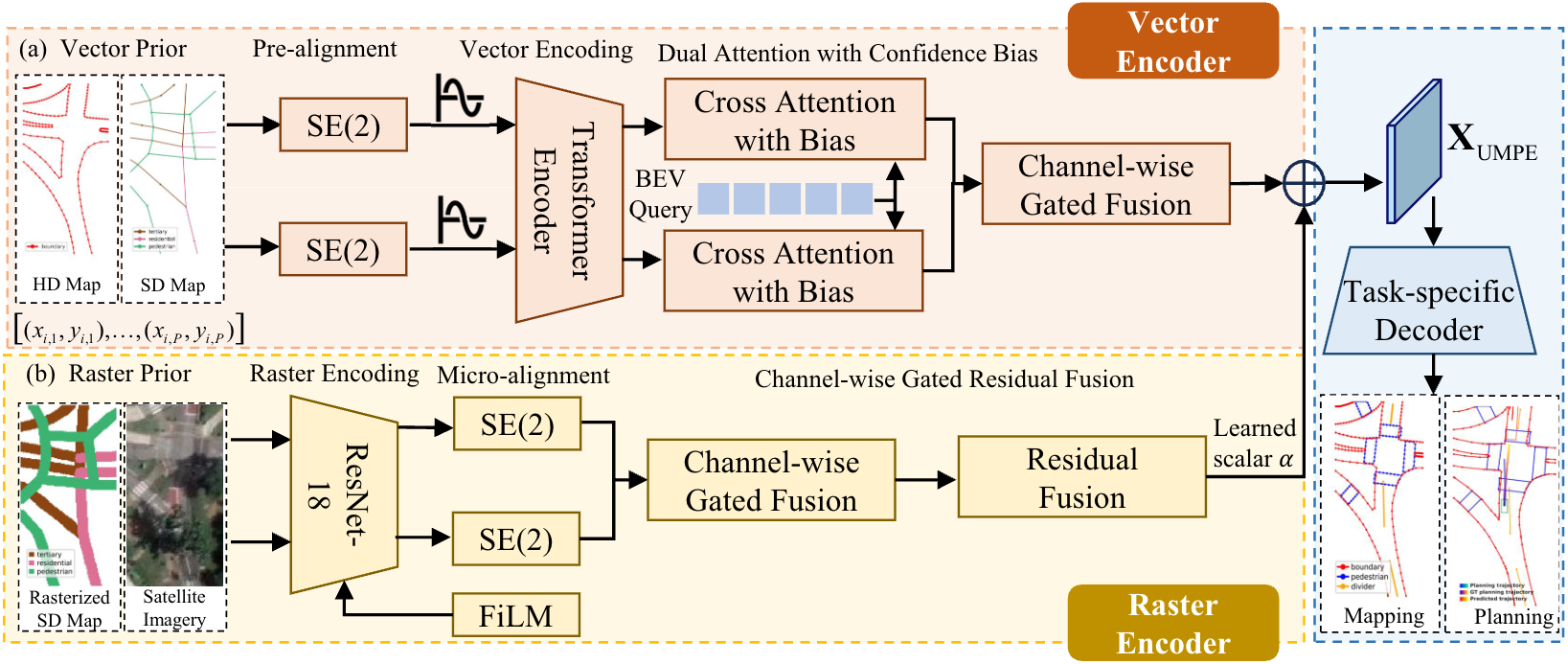
Unified Map Prior Encoder for Mapping and Planning
Zongzheng Zhang*, Guantian Zheng*, Sizhe Zou*, Zhenxin Zhu, Guoxuan Chi, Anqing Jiang, Hao Zhao†
UMPE addresses the underutilization of heterogeneous map priors in autonomous driving through a unified dual-branch encoder that integrates HD/SD vector maps, satellite imagery, and rasterized SD maps with BEV features.
ICRA 2026 (Oral) [arXiv] [project page] [code]
Zongzheng Zhang*, Guantian Zheng*, Sizhe Zou*, Zhenxin Zhu, Guoxuan Chi, Anqing Jiang, Hao Zhao†
UMPE addresses the underutilization of heterogeneous map priors in autonomous driving through a unified dual-branch encoder that integrates HD/SD vector maps, satellite imagery, and rasterized SD maps with BEV features.
ICRA 2026 (Oral) [arXiv] [project page] [code]
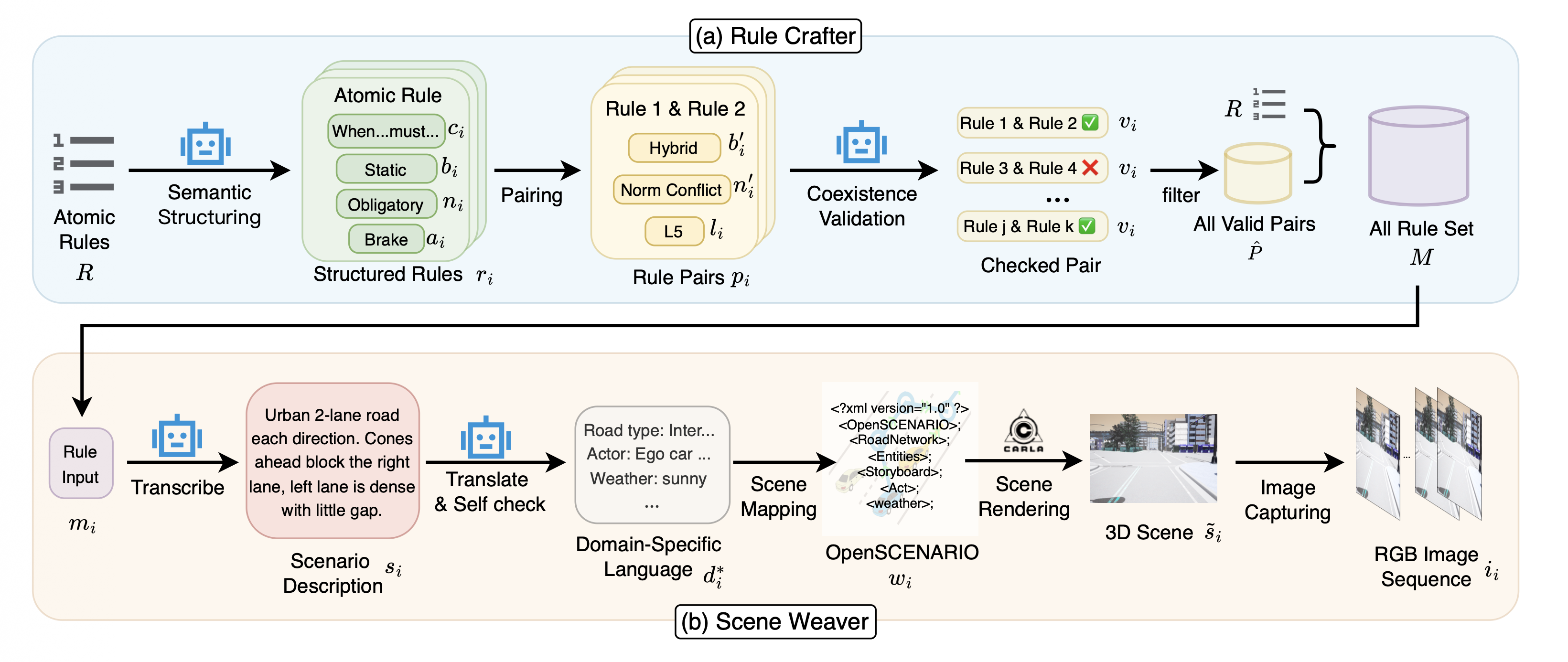
DriveCombo: Benchmarking Compositional Traffic Rule Reasoning in Autonomous Driving
Enhui Ma*, Guantian Zheng*, Jiahuan Zhang*, Tao Tang, Yuhang Lu, Kaicheng Yu†
DriveCombo is a novel benchmark designed to evaluate and enhance the complex traffic rule reasoning capabilities of multimodal large language models in autonomous driving.
CVPR 2026 [arXiv] [project page] [code]
Enhui Ma*, Guantian Zheng*, Jiahuan Zhang*, Tao Tang, Yuhang Lu, Kaicheng Yu†
DriveCombo is a novel benchmark designed to evaluate and enhance the complex traffic rule reasoning capabilities of multimodal large language models in autonomous driving.
CVPR 2026 [arXiv] [project page] [code]
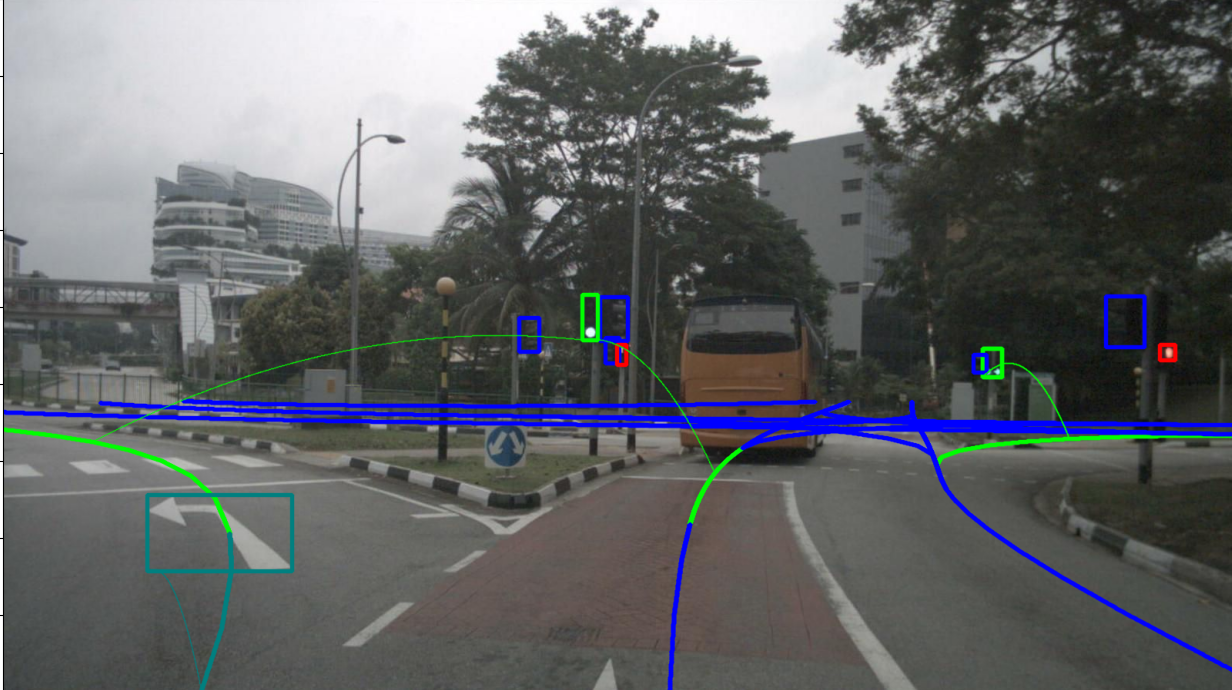
Openlane-V3
Guantian Zheng, Zongzheng Zhang, Jijun Wang, Hao Zhao†
OpenLane-V3 is an extended version of the OpenLaneV2 benchmark, integrating additional modalities including 3D traffic light and traffic sign annotations with semantic and positional information.
Guantian Zheng, Zongzheng Zhang, Jijun Wang, Hao Zhao†
OpenLane-V3 is an extended version of the OpenLaneV2 benchmark, integrating additional modalities including 3D traffic light and traffic sign annotations with semantic and positional information.
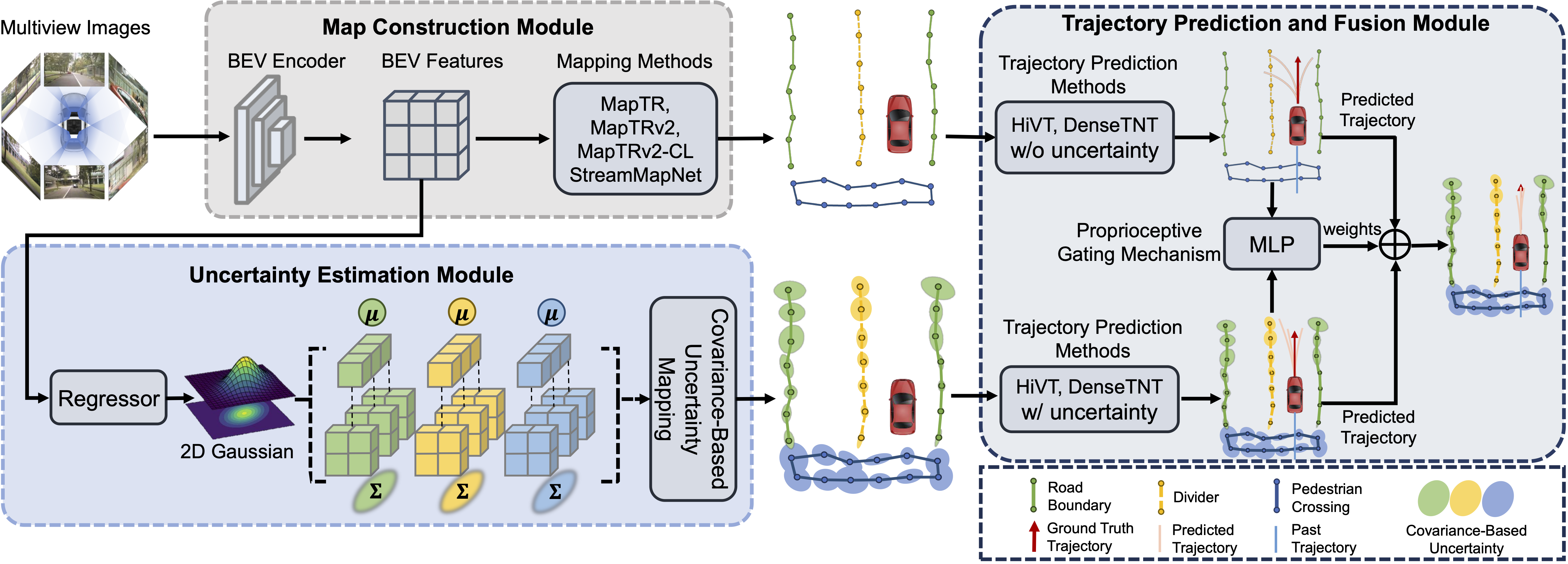
Delving into Mapping Uncertainty for Mapless Trajectory Prediction
Zongzheng Zhang*, Guantian Zheng*, Xuchong Qiu*, Boran Zhang, Igor Gilitschenski, Xunjiang Gu, Hang Zhao†, Hao Zhao†
Propose lightweight Proprioceptive Scenario Gating module and Covariance-Based Map Uncertainty model, achieving up to 23.6% performance improvement over prior SOTA methods.
IROS 2025 (Oral) [arXiv] [project page] [code]
Zongzheng Zhang*, Guantian Zheng*, Xuchong Qiu*, Boran Zhang, Igor Gilitschenski, Xunjiang Gu, Hang Zhao†, Hao Zhao†
Propose lightweight Proprioceptive Scenario Gating module and Covariance-Based Map Uncertainty model, achieving up to 23.6% performance improvement over prior SOTA methods.
IROS 2025 (Oral) [arXiv] [project page] [code]
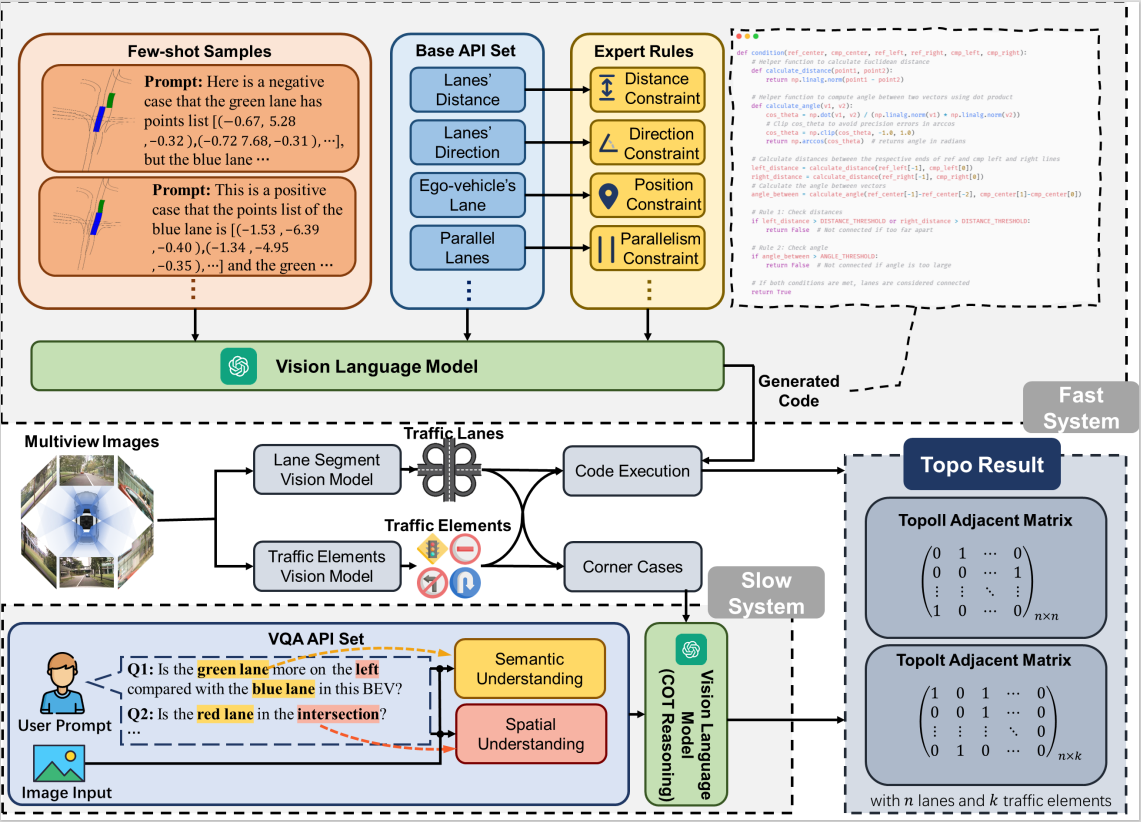
Chameleon: Fast-slow Neuro-symbolic Lane Topology Extraction
Zongzheng Zhang, Xinrun Li, Sizhe Zou, Guantian Zheng, Guoxuan Chi, Siqi Li, Hang Zhao†, Hao Zhao†
Propose neuro-symbolic algorithm combining symbolic reasoning with Chain-of-Thought VLMs, reducing inference time from >200s to 0.1-8s per frame with 5% accuracy improvement.
ICRA 2025 (Oral) [arXiv] [code]
Zongzheng Zhang, Xinrun Li, Sizhe Zou, Guantian Zheng, Guoxuan Chi, Siqi Li, Hang Zhao†, Hao Zhao†
Propose neuro-symbolic algorithm combining symbolic reasoning with Chain-of-Thought VLMs, reducing inference time from >200s to 0.1-8s per frame with 5% accuracy improvement.
ICRA 2025 (Oral) [arXiv] [code]
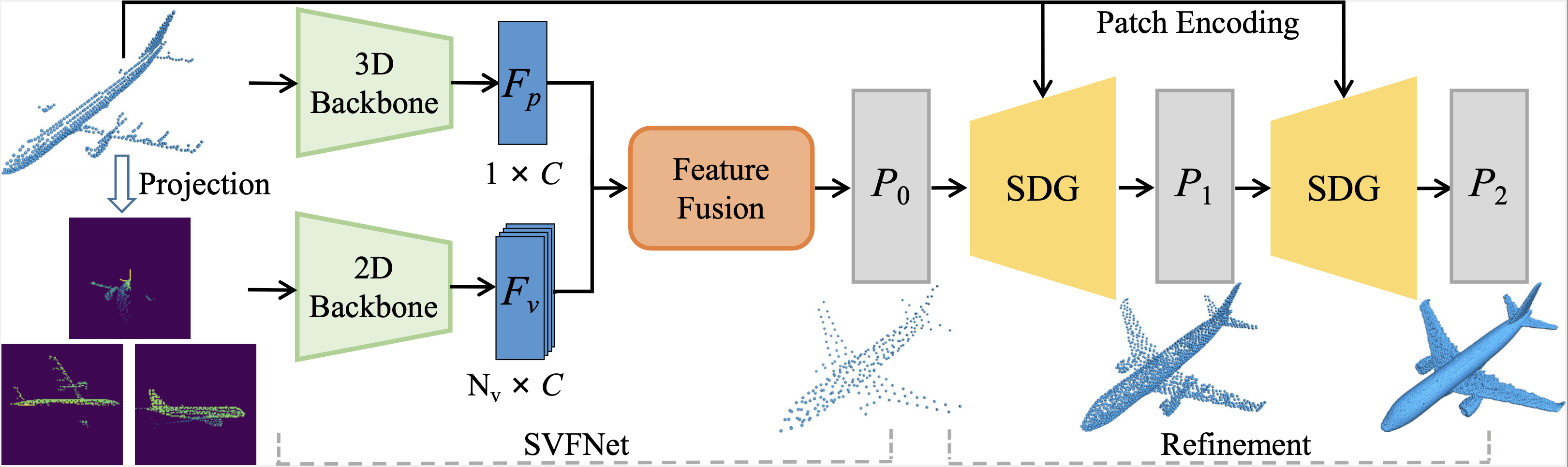
Enhanced Point Cloud Reconstruction with PTv3 and Dual Hyper in SVDFormer
Guantian Zheng, Boran Zhang
Proposed a HyperChamfer Embedding with a dual-hypernetwork architecture to inject global geometric structure into refinement, and integrated PTv3 backbone for efficient acceleration.
Guantian Zheng, Boran Zhang
Proposed a HyperChamfer Embedding with a dual-hypernetwork architecture to inject global geometric structure into refinement, and integrated PTv3 backbone for efficient acceleration.
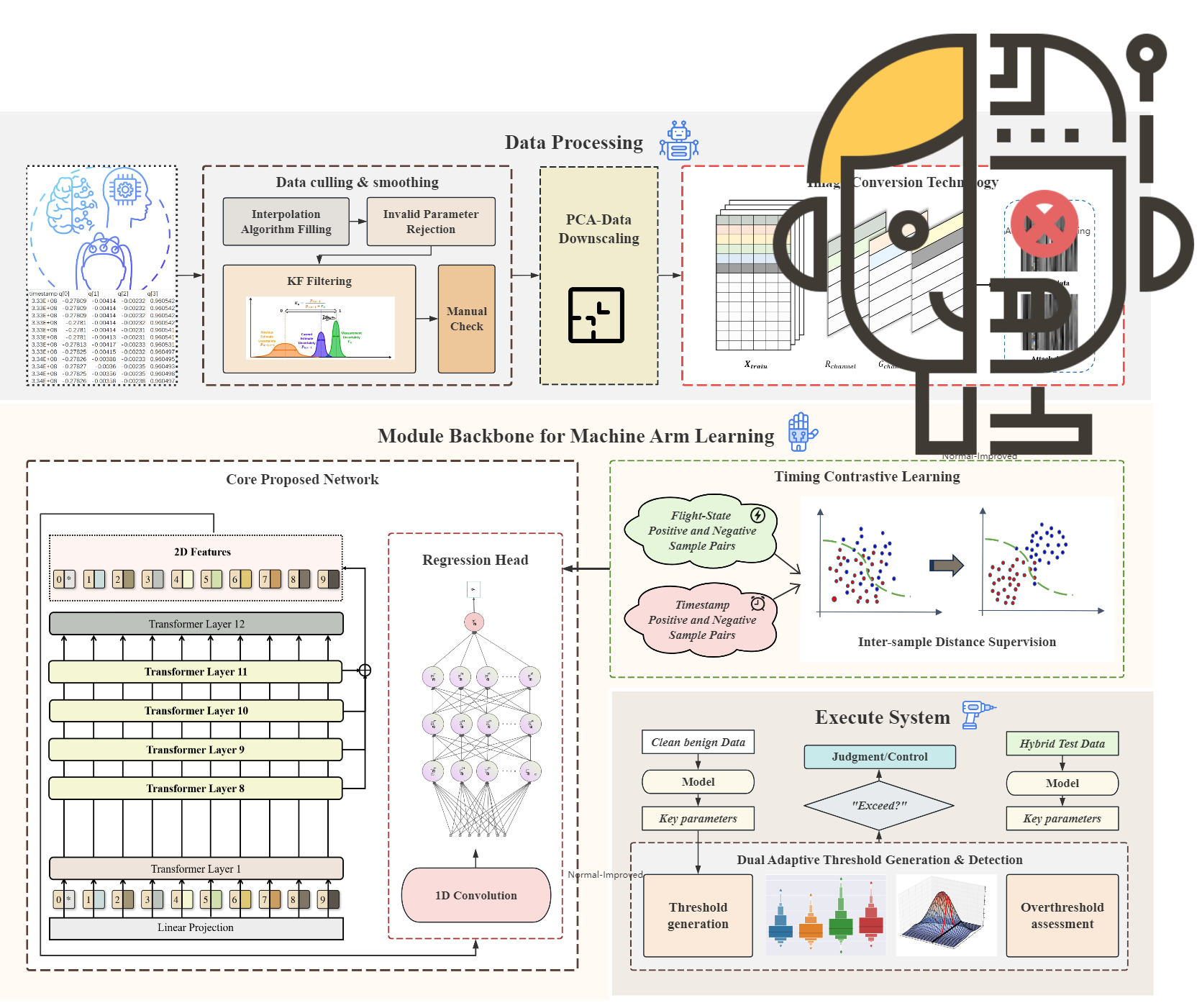
Brain-Controlled Robotic Arm
Guantian Zheng, Jincheng Yang, Dawei Ye†
Achieved real-time recognition and control of a single hand with five degrees of freedom, with future plans to enable assisting paralyzed individuals in daily tasks such as eating, gripping, and writing.
Guantian Zheng, Jincheng Yang, Dawei Ye†
Achieved real-time recognition and control of a single hand with five degrees of freedom, with future plans to enable assisting paralyzed individuals in daily tasks such as eating, gripping, and writing.
Honors & Awards
- Outstanding Graduate of HUST (2026)
- Academic Excellence Scholarship (2025)
- Self-Motivation and Diligence Scholarship (2024)
- Academic Excellence Scholarship (2023)