
Hi there  Welcome to my Homepage!
Welcome to my Homepage!
I am an undergraduate (2022-2026) at Huazhong University of Science and Technology, passionate about Autonomous Driving and Computer Vision. I work at AIR@Tsinghua with Prof. Hao Zhao and Autolab@WLU with Prof. Kaicheng Yu.
News
- Unleash the potential of uncertainty: Delving into Uncertainty is accepted in IROS 2025🔥
- Our work on lane topology: Chameleon is accepted in ICRA 2025 (Oral Presentation)🔥
- Our brain-computer interface project: Brain-Controlled Robotic Arm was selected as National Innovation Program (National-level)🏆
Experience
Westlake University
Jun 2025 – Present
Research Assistant at AutoLab
Tsinghua University
Jun 2024 – Present
Research Assistant at AIR
Huazhong University of Science and Technology
Sep 2022 – Jul 2026
Research Assistant at XWCV
Selected Projects
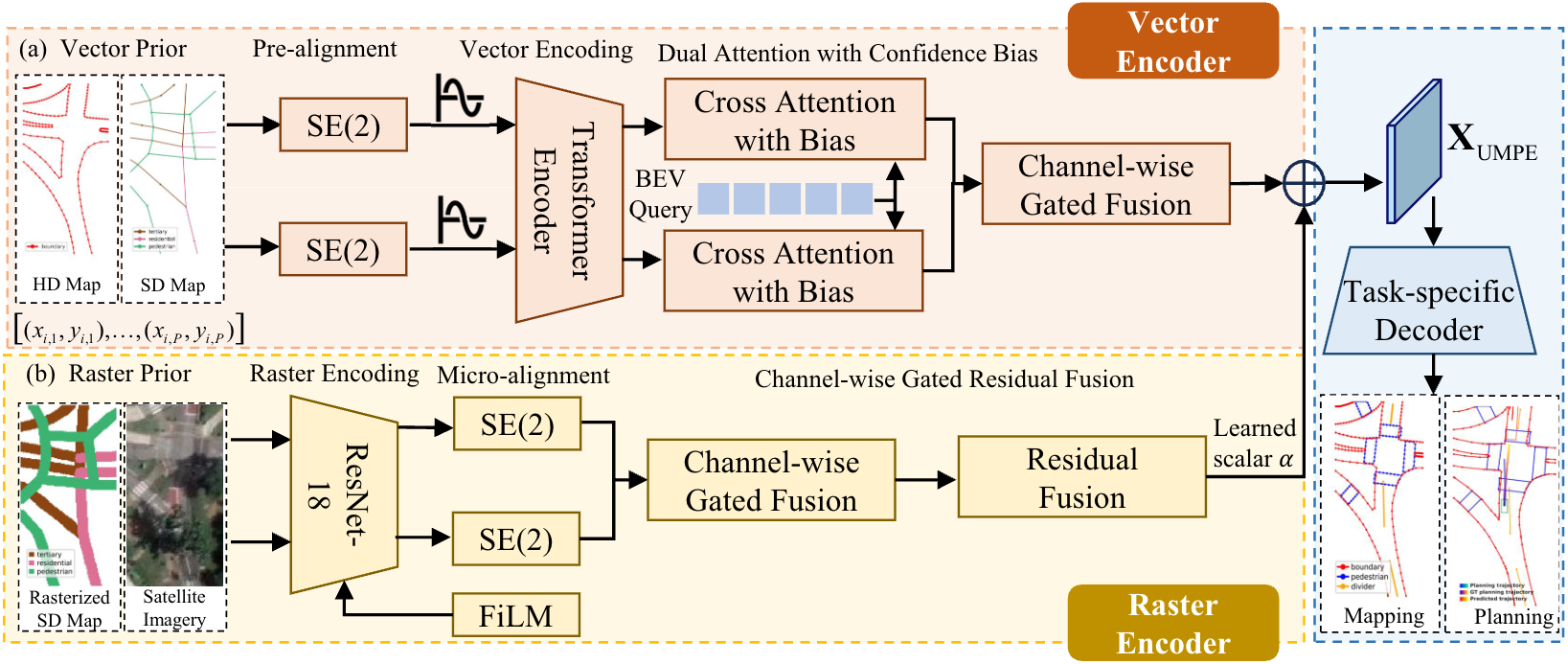
UMPE: Unified Map Prior Encoder for Mapping and Planning
UMPE addresses the underutilization of heterogeneous map priors in autonomous driving through a unified dual-branch encoder that integrates HD/SD vector maps, satellite imagery, and rasterized SD maps with BEV features. It achieves significant improvements in both mapping (+5.9 mAP on MapTRv2) and planning (42% trajectory error reduction) while maintaining robustness across different prior availability scenarios.
ICRA 2026 (Submission) [code]
UMPE addresses the underutilization of heterogeneous map priors in autonomous driving through a unified dual-branch encoder that integrates HD/SD vector maps, satellite imagery, and rasterized SD maps with BEV features. It achieves significant improvements in both mapping (+5.9 mAP on MapTRv2) and planning (42% trajectory error reduction) while maintaining robustness across different prior availability scenarios.
ICRA 2026 (Submission) [code]

TrafficGenBench: A Generative Benchmark for Probing the Reasoning Limits of AI Agents in Complex Traffic Scenarios
Guantian Zheng, Enhui Ma, Kaicheng Yu†
CVPR 2026 (Plan to Submit)
Guantian Zheng, Enhui Ma, Kaicheng Yu†
CVPR 2026 (Plan to Submit)
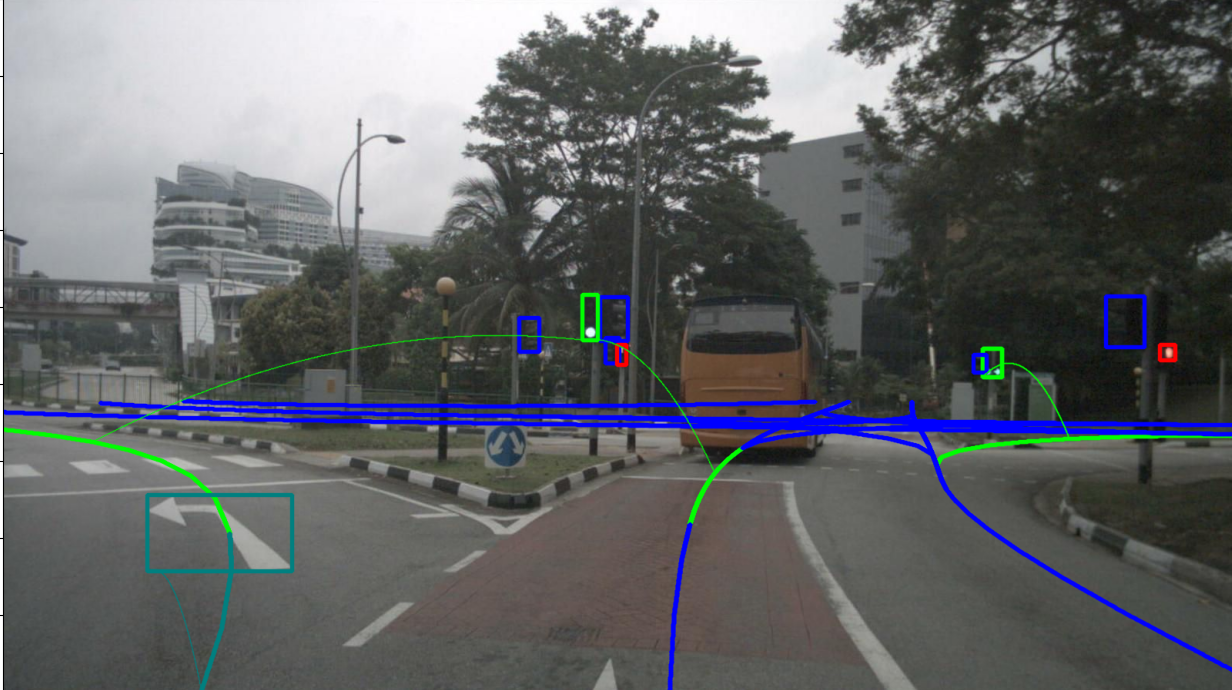
Openlane-V3
Guantian Zheng, Zongzheng Zhang, Jijun Wang, Hao Zhao†
OpenLane-V3 is an extended version of the OpenLaneV2 benchmark, integrating additional modalities including 3D traffic light and traffic sign annotations with semantic and positional information. It aims to evaluate and demonstrate the impact of multi-modal cues on autonomous driving perception and planning tasks.
CVPR 2026 (Plan to Submit)
Guantian Zheng, Zongzheng Zhang, Jijun Wang, Hao Zhao†
OpenLane-V3 is an extended version of the OpenLaneV2 benchmark, integrating additional modalities including 3D traffic light and traffic sign annotations with semantic and positional information. It aims to evaluate and demonstrate the impact of multi-modal cues on autonomous driving perception and planning tasks.
CVPR 2026 (Plan to Submit)
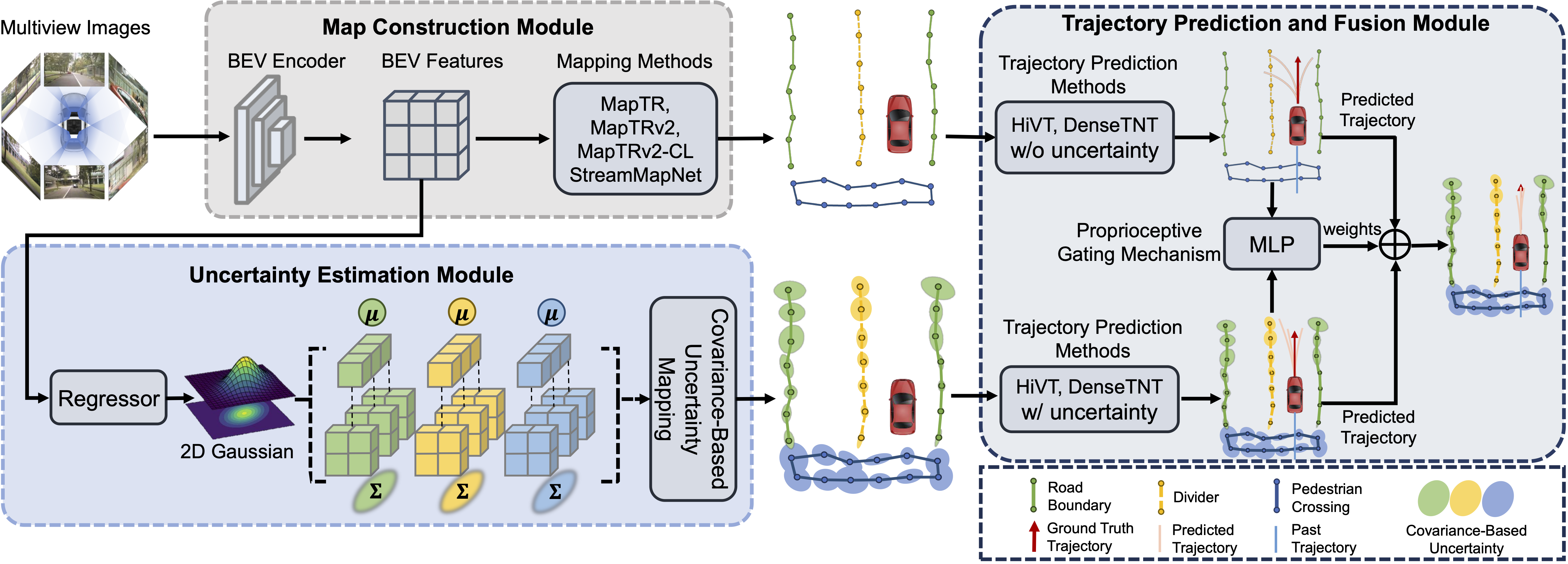
Delving into Mapping Uncertainty for Mapless Trajectory Prediction
Zongzheng Zhang, Guantian Zheng, Xuchong Qiu, Boran Zhang, Igor Gilitschenski, Xunjiang Gu, Hang Zhao†, Hao Zhao†
Propose lightweight Proprioceptive Scenario Gating module and Covariance-Based Map Uncertainty model, achieving up to 23.6% performance improvement over prior SOTA methods.
IROS 2025 [arXiv] [project page] [code]
Zongzheng Zhang, Guantian Zheng, Xuchong Qiu, Boran Zhang, Igor Gilitschenski, Xunjiang Gu, Hang Zhao†, Hao Zhao†
Propose lightweight Proprioceptive Scenario Gating module and Covariance-Based Map Uncertainty model, achieving up to 23.6% performance improvement over prior SOTA methods.
IROS 2025 [arXiv] [project page] [code]
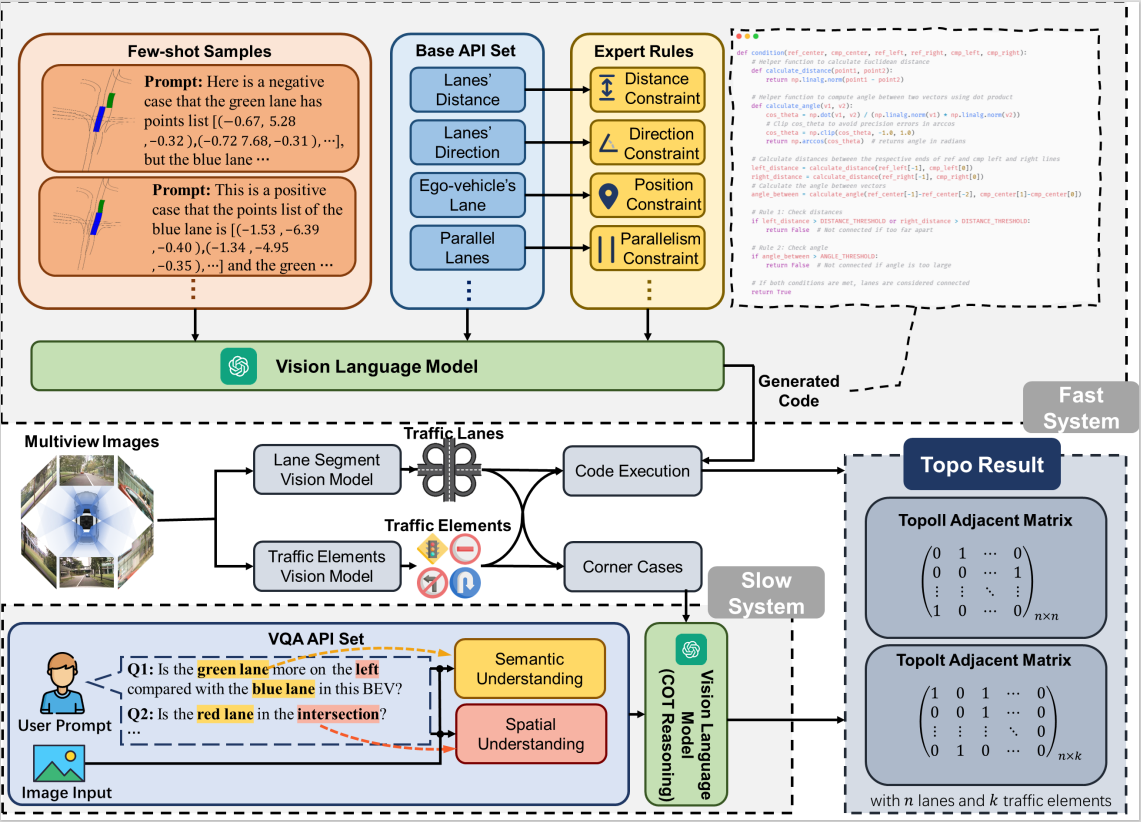
Chameleon: Fast-slow Neuro-symbolic Lane Topology Extraction
Zongzheng Zhang, Xinrun Li, Sizhe Zou, Guantian Zheng, Guoxuan Chi, Siqi Li, Hang Zhao†, Hao Zhao†
Propose neuro-symbolic algorithm combining symbolic reasoning with Chain-of-Thought VLMs, reducing inference time from >200s to 0.1-8s per frame with 5% accuracy improvement.
ICRA 2025 (Oral Presentation) [arXiv] [code]
Zongzheng Zhang, Xinrun Li, Sizhe Zou, Guantian Zheng, Guoxuan Chi, Siqi Li, Hang Zhao†, Hao Zhao†
Propose neuro-symbolic algorithm combining symbolic reasoning with Chain-of-Thought VLMs, reducing inference time from >200s to 0.1-8s per frame with 5% accuracy improvement.
ICRA 2025 (Oral Presentation) [arXiv] [code]
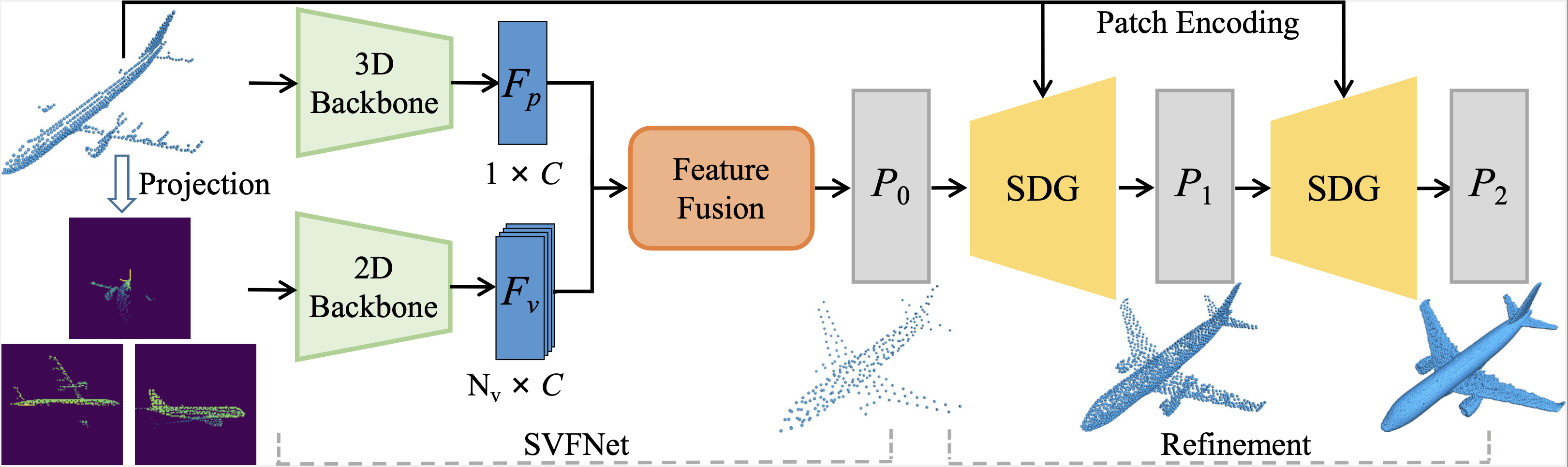
Enhanced Point Cloud Reconstruction with PTv3 and Dual Hyper in SVDFormer
Guantian Zheng, Boran Zhang,
Proposed a HyperChamfer Embedding with a dual-hypernetwork architecture to inject global geometric structure into refinement, and integrated PTv3 backbone for efficient acceleration. Achieved structure-aware completion and a 17% improvement on ShapeNet-55, while maintaining fast training and inference.
Guantian Zheng, Boran Zhang,
Proposed a HyperChamfer Embedding with a dual-hypernetwork architecture to inject global geometric structure into refinement, and integrated PTv3 backbone for efficient acceleration. Achieved structure-aware completion and a 17% improvement on ShapeNet-55, while maintaining fast training and inference.
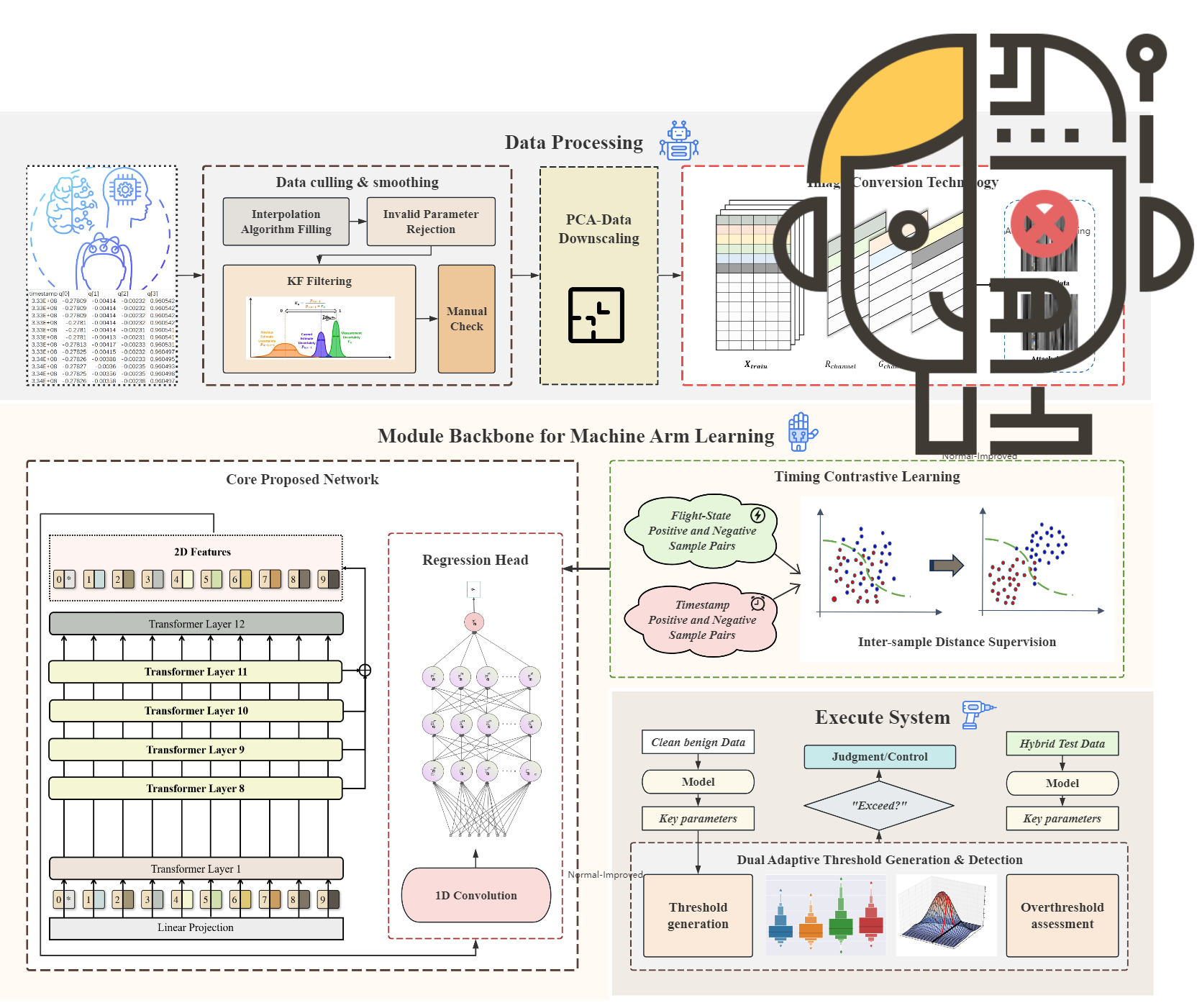
Brain-Controlled Robotic Arm
Guantian Zheng, Jincheng Yang, Dawei Ye†,
Achieved real-time recognition and control of a single hand with five degrees of freedom, with future plans to enable assisting paralyzed individuals in daily tasks such as eating, gripping, and writing.
Guantian Zheng, Jincheng Yang, Dawei Ye†,
Achieved real-time recognition and control of a single hand with five degrees of freedom, with future plans to enable assisting paralyzed individuals in daily tasks such as eating, gripping, and writing.
Honors & Awards
- Academic Excellence Scholarship (2025)
- Self-Motivation and Diligence Scholarship (2024)
- Academic Excellence Scholarship (2023)
- National Math Competition - 2nd Prize (2022)
I’m actively seeking research opportunities in Autonomous Driving and Computer Vision for graduate studies. Feel free to reach out if you’d like to collaborate.